面向 PPT 的自控复习
复习资料:PPT 自控英文书 自控中文书
第一次尝试面向 PPT 复习,主要思路是以 PPT 为骨架,然后用书籍、资料和练习进行血肉的补充。
重点会使用引用的形式标出来
1
Controller sensor actuator ref
3
7 The Root Locus Method
7.1 What is a Root Locus
回忆一下特征方程,特征方程只在闭环中出现。这里的特征方程是默认反馈的增益为 1 的。
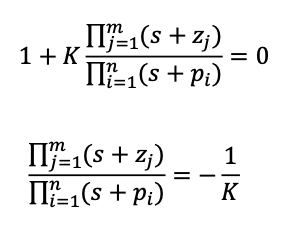
特征方程:
注意,K 始终为自然数
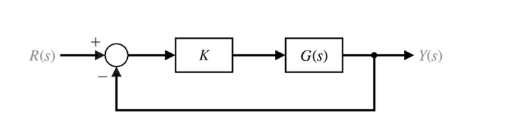
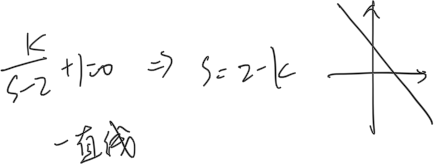
Root locus 方法是画出在 K 变化时的根轨迹。根指的就是闭环极点。
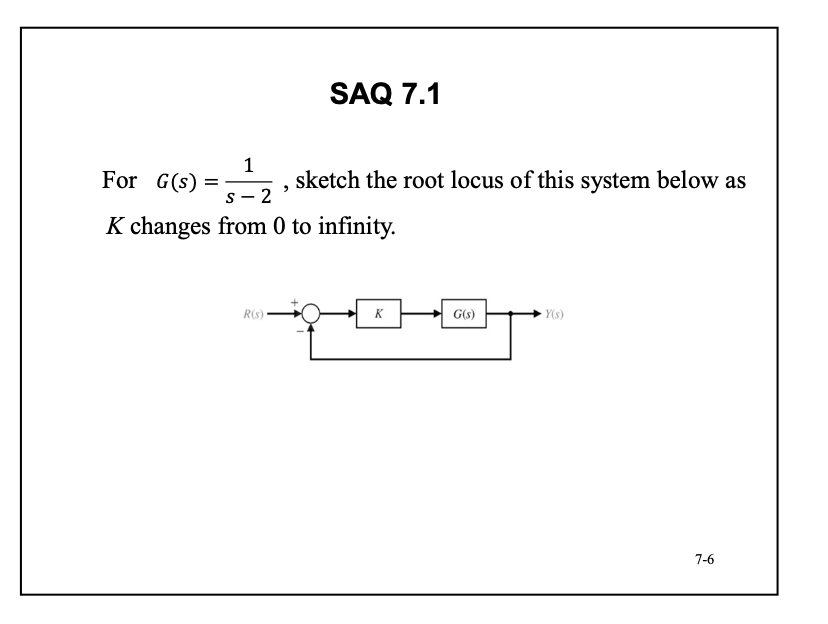
画出来是一条直线
7.2 Root locus Procedure
步骤一:解特征方程
根轨迹本质上是在解方程,所以首先列出特征方程,根据特征方程做文章。
以下是第一个步骤
- 分解
- 在图中画出零点和极点

- 零点画 o 极点画 x
- 画出 separate loci
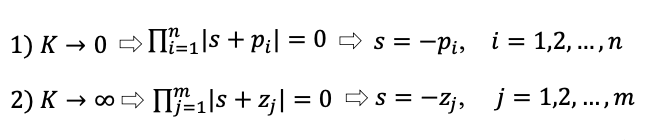
- 从 n 个极点画到到 m 个零点,其他的点直接飞走,飞到无穷
- 所以有(n-m)个 branches
- the root loci are symmetrical with respect to the horizontal real axis
- 这是由于在分解传递函数的时候复数根总是成对出现。可以想一想初中解二次方程的时候,那个正负根号 4ab 是虚数项。事实上,实高次方程总可以拆成根相乘的形式,没有实数解的总会由两个共轭复数解凑出来
- 分解
$ G(s) $ 是开环传递函数,所以有零点和极点。根据回忆,零点和极点都是由于拉普拉斯方程中微分和积分项的存在,所以我们是在根据开环的方程来描述闭环的表现。如何保证开环和闭环是单映射呢?我们其实简化了方程
那对于那些反馈不是常函数的系统呢?
在 K 趋向于 0 的时候,只有极点会起作用;在 K 趋向于 的时候,只有零点会起作用。所以在画根轨迹法的时候,总是由极点画到零点。这点非常重要,似乎是一个趋势。
步骤 2:实数轴连点成线
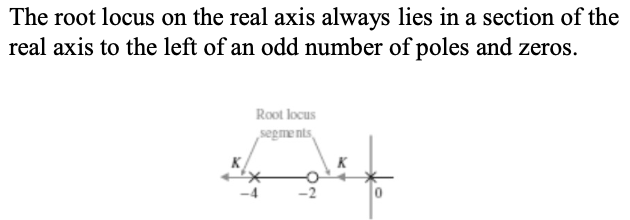
这个情况我觉得是假设有实数根的情况下一定符合,但是仍然是有很多问题的。
第一,假如很多极点连续的排列在实轴上呢
第二,为什么一定是往负方向走?
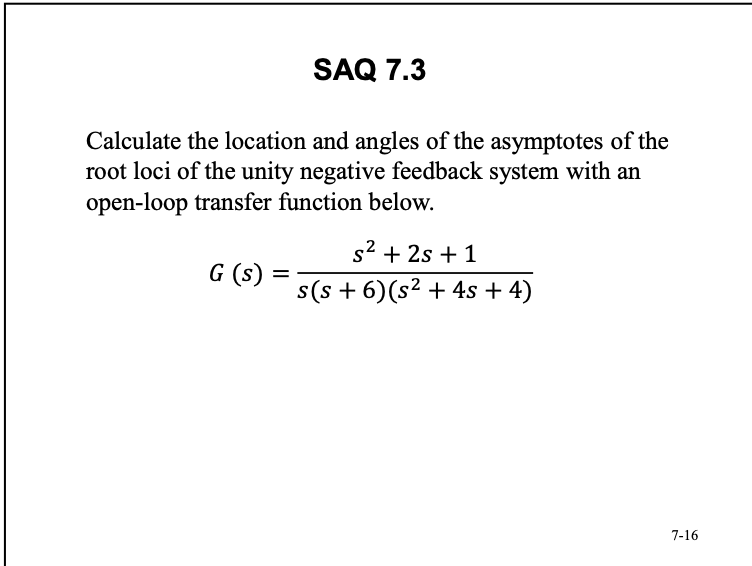
步骤 3: 渐进线
由步骤 1 可以看出,渐进线是由于飞走的 branch 产生的。所有的渐进线都交于实数轴上的一个点。
为啥是一个点?
这个点是
注意符号,带负号的才是零点和极点。还有是极点减去零点,就跟分母一样,因为分母总是比分子高次。
一个点分出来了很多条渐进线,公式是
把 n-m 带入这个公式,会发现很有意思的事情。在 n-m=0 的时候没有意义。大于 1 的时候总会有渐进线走向实负轴。然后剩下的事实上是在平分这个平面。
这个时候 PPT 展示了一张狗屎推导。
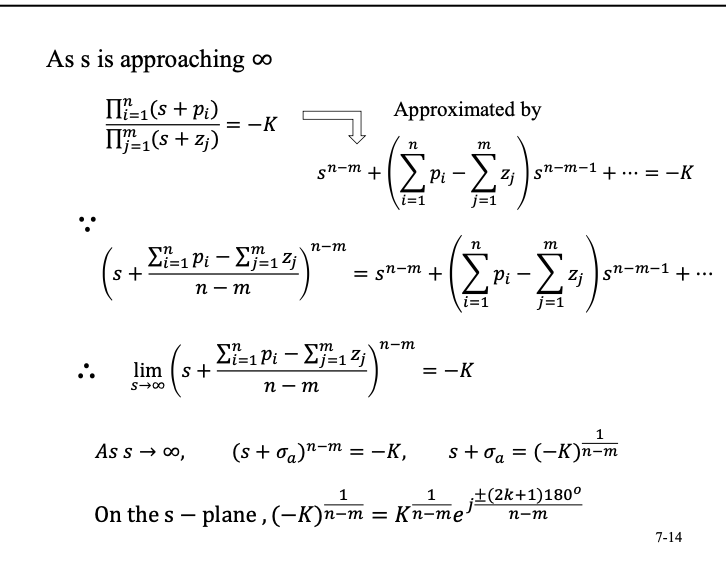
事实上是这俩公式的推导,可看可不看。
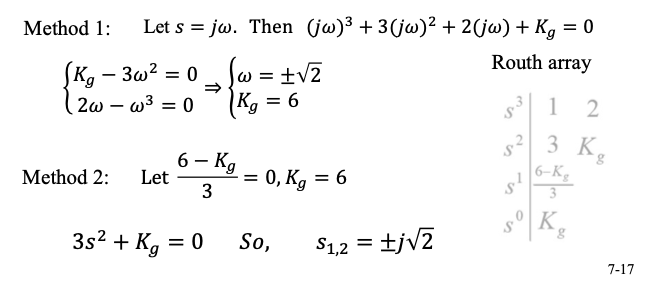
步骤 4: 确定 locus 路过虚轴上的点
乱飞的 branch 有时会碰到虚轴,我们为什么要确定虚轴上的点呢,因为这是稳定性的阈值。
本质上也是在解特征方程,然后把全部替换为
步骤 5: determine the breakaway point on the real axis
刚刚确定了渐进线的交点,但是真正的 locus 是在哪里分离的呢,就是 breakaway point。
还是解特征方程,把 K 写作 s 的方程
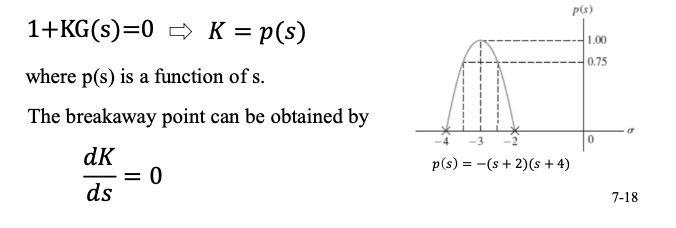
然后导数为 0,就可以得到分离点了。
步骤 6: 画出出发和到达的角度
不在轴上的点怎么处理?从极点出发,到达零点都有一个角度,这个角度让我们相对于实轴进行。
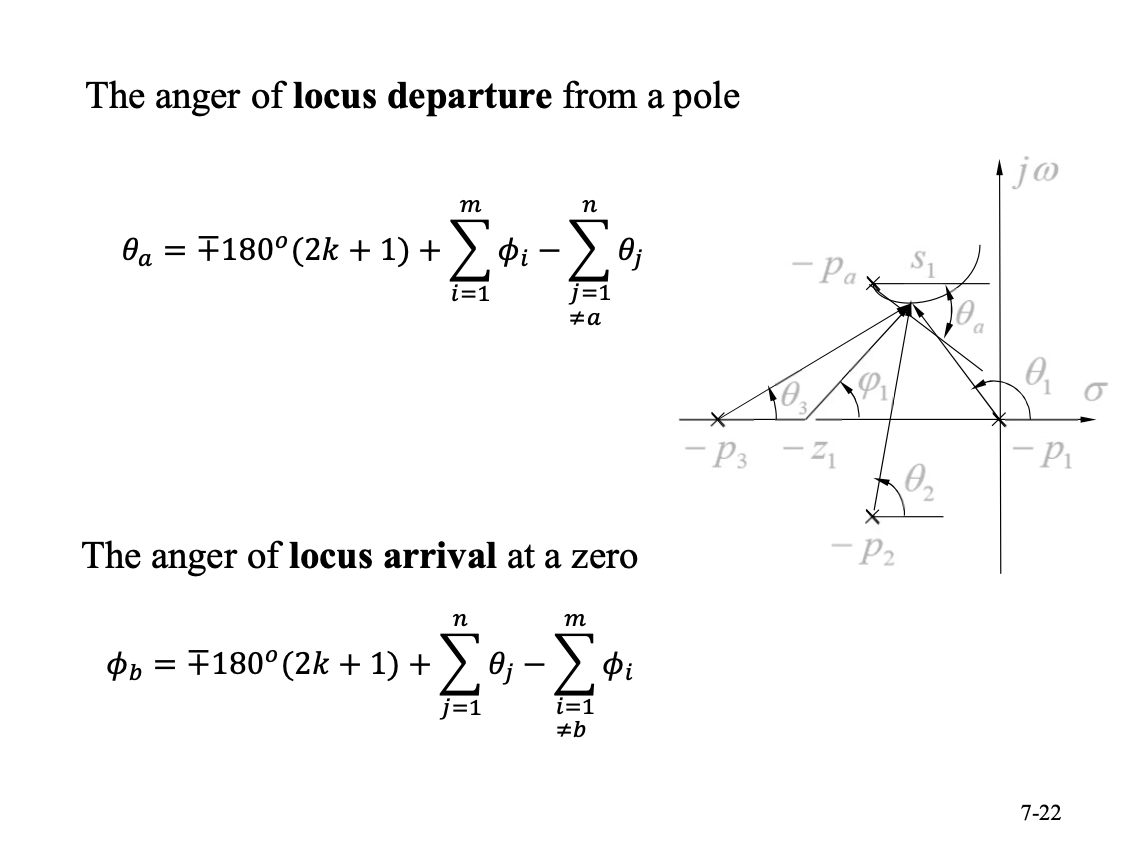
这张 PPT 讲的其实很清楚了,假如你是零点,就正负 180 度加上极点减去其他零点,然后转化到正负 180 度以内好画出来。
**这里有一个问题,就是 180 度的问题,决定了到你这来的方向,目前还没有看到讲解?**我倾向于你在虚轴上方就是加 180 度,在虚轴下方就是减 180 度
步骤 7: 结束!
接下来是连点成线,手画或者 matlab
然后是判断一个点在不在你的根轨迹上,
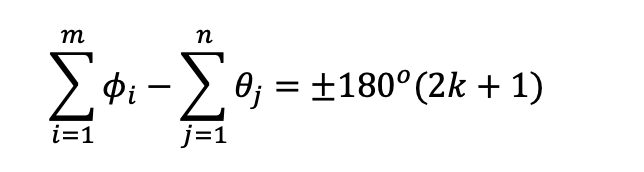
相位法:

在轨迹上的点显然都满足这个条件。
但是是不是所有满足这个条件的点都在直线上? 我暂且认为是对的。
然后是判断你的一个点上的 K 值
注意 p 在上,z 在下,别搞反了。K 始终和极点在一个位置。
特殊的根轨迹
- arc root locus
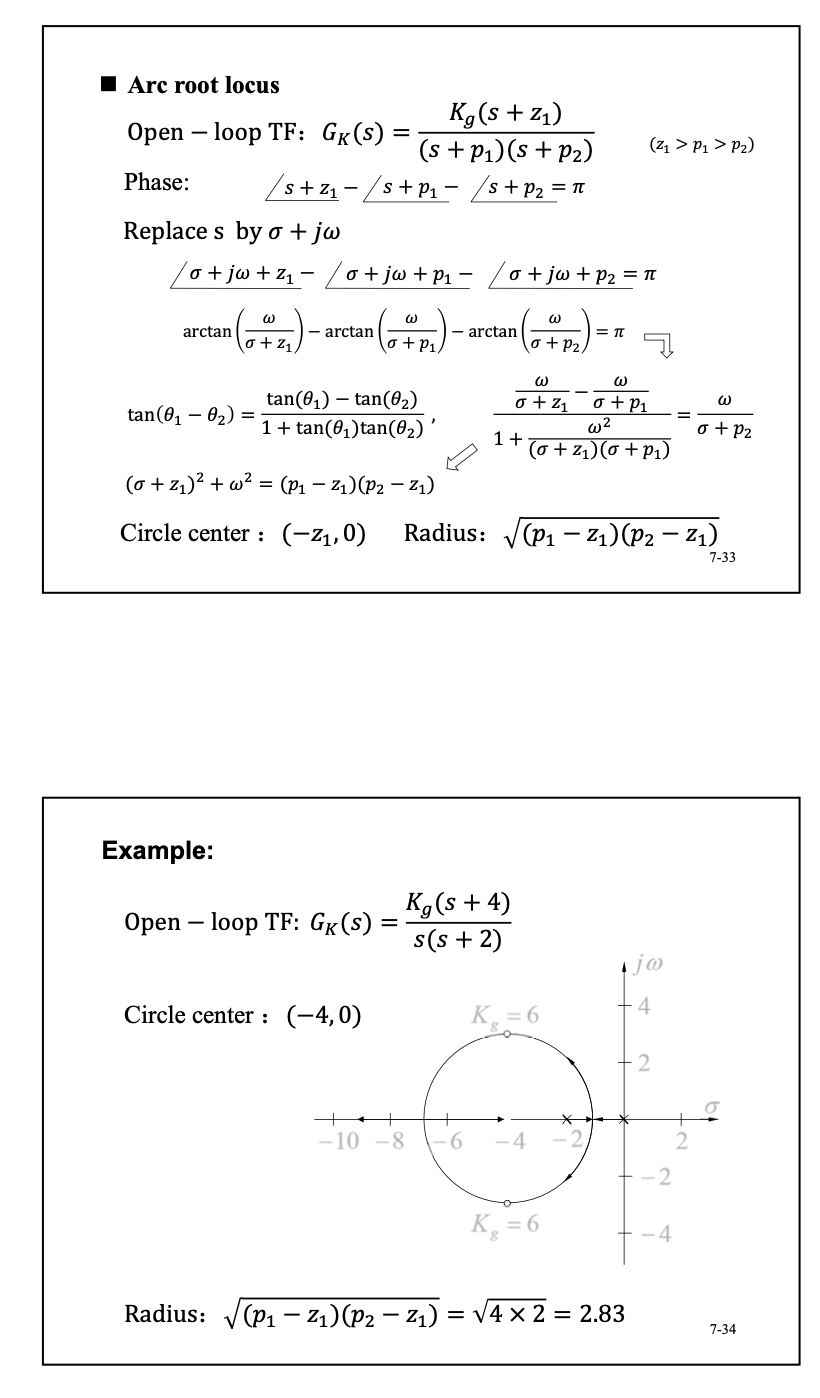
挺好玩的。
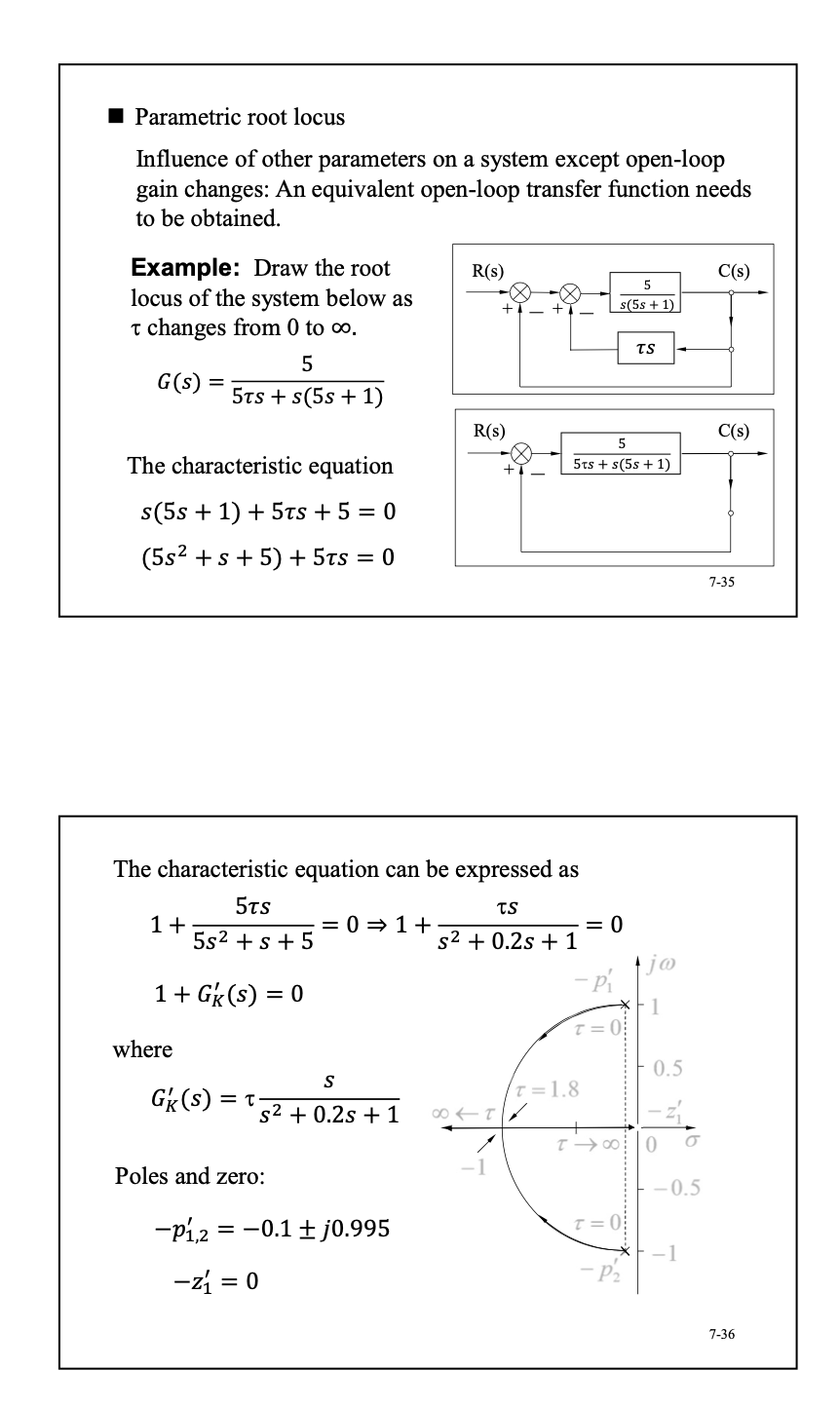
- Parametric 根轨迹
7.3 Properties of Root Locus
8 PID Control
P control
注意这个 e 不是指数
然后
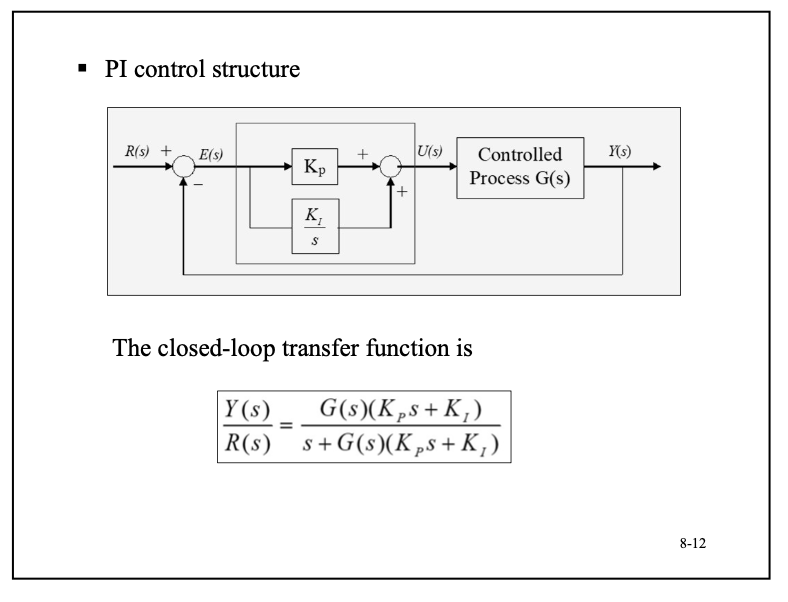
PI controllers
突然想到,很多时候要做到计算效果带宽有关系
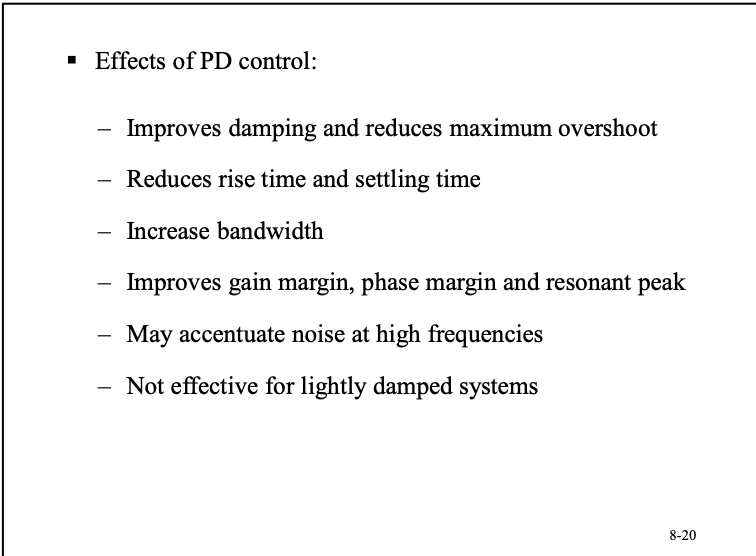
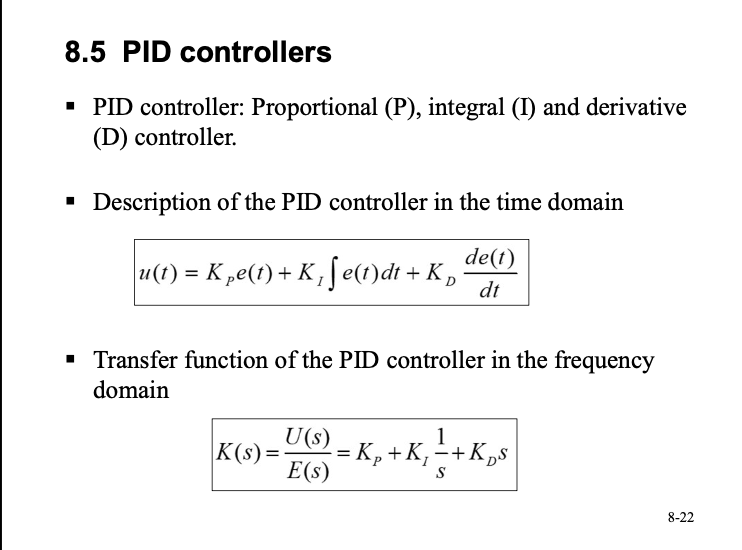
PD Control
Ziegler-Nichols Oscillation Method